• Achieving better robotic manipulation with light
• Sensor Tip: Linearity defined and why it matters
• Application: Large oil flow valves
• and more. |
To view newsletter in your browser click here.
|
|
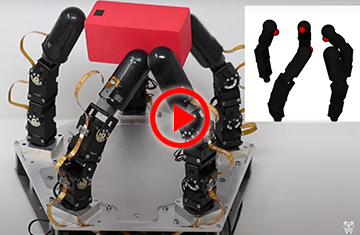
Highly Dexterous Robotic Hand
Photo credit: Columbia University Roam Lab |
| | | |
| | | |
| | | |
Using Light to Achieve More Dexterity in Robotic Fingers
Underneath the skin
Photo credit: Columbia University Roam Lab |
|
Columbia University researchers have advanced the state of robotic touch-based manipulation of objects.1 They Utilize an array of LED transmitters and photodiode receivers, covered in a 7 to 8 mm reflective membrane skin.2
Collectively, the robotic fingers hold and manipulate an object. As the object flexes the membrane in the fingers, each finger independently has the path of the light transmitted by the LEDs altered. The receiving photodiodes detect the changes and the information is processed to determine how tightly an object is gripped. Accuracy is said to be less than 1 mm.
Additionally, the research team "taught" the hand "gaiting," or all fingers working in a coordinated manner, to manipulate an object's position. This was achieved by "learning and sampling-based motion planning," collecting data on a series of movements and adjusting as needed.2
The complete research paper "Sampling-based Exploration for Reinforcement Learning of Dexterous Manipulation" is linked to in reference 3. |
| | | |
| | | |
 |
Linearity - How It Is Defined and Why It Matters
Linearity matters a lot for two reasons. First, for smooth performance of a machine control application and to operate within specified accuracy as well. When a control for an application is moved, virtually all applications require a smooth relationship between the control input, such as a position or angle sensor, and the controlled output. Otherwise the output behavior may be "jumpy." The other concern is that undesirable or unpredictable results may occur if a certain amount of accuracy is not maintained, and linearity is one of the key attributes in calculating accuracy.
Linearity
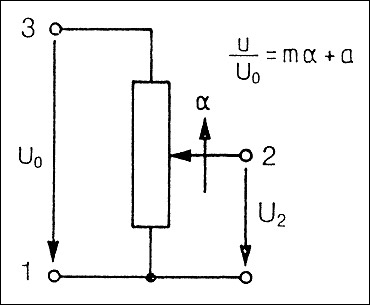
Independent and absolute linearity terms express the extent to which the voltage output, from a position sensor or potentiometer, and also other types of angular of linear movement sensors, differ from a theoretical function similar to y = (m • x) + a.
Where "m" represents gradient (or gain) and "a" represents an offset. In the vast majority of cases, the desired output function is directly proportional to the angle or linear movement that is input.
In the example shown in figure 1, m represents the gradient, a is the offset voltage of the potentiometer and α is the linear or angular travel. U0 is the input voltage and U2 is the voltage across the wiper and ground.
Where there is an absolute linear relationship, deviation is referred to as linearity. An index point on the actual output is required. The opposite wording use is the case for independent linearity, as described below.
|
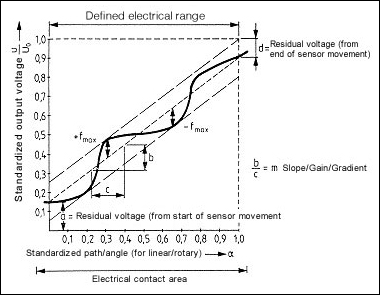
Independent Linearity
If a voltage U0 is applied to a potentiometer with a linear characteristic as in Fig. 1 and the wiper is moved in direction a (standardized movement, position or angle 0:1 where 1 represents 100% - full scale angle or stroke) then the relationship illustrated in Fig. 2 will exist between the output voltage and the mechanically input value. The maximum deviation of the potentiometer curve from an ideal straight line is referred to as the independent linearity error. |
| | | |
Large Oil Flow Valves, Marine Deck Machines
| | | |
| | | |
|
|
On large marine vessels, ultra-reliable deck machinery is critical to a safe and profitable maritime operation. A gold standard manufacturer, with a household-known name, needed to track valve position of an oil flow regulator for a 2,300 HP winch motor on a line of machinery. This in-cylinder application is met with TH1 250 linear position sensors. These sensors have linearity to ±25 micrometers and unlimited mechanical life.
Learn more.
|
| | | |
| | | |
 |
| |
| Please email suggestions for technical subjects you would like to suggest for this newsletter to this link: Newsletter Editor |
| | | | |
| |
|